Abstract
The ZeGoBeast Electric Robot is a wooden kinetic machine that walks life-like, and teaches about the design process along the way. I had the opportunity to learn about, build, & revise one of these cool robots under Mr. Daniel Goncharov & Mr. Alex Thomson. Specifically, I designed 2D & 3D models in CorelDRAW & Fusion 360, lasercut & 3D printed pieces, created relay circuits to control motors with controllers, and revised the robot design until the final iteration. This culminated with showcasing our designs at the 2016 New York Maker Faire.
Demo & Project Links
The following images link to the original ZeGoBeast Kickstarter page, final demo video, & 2016 MakerFaire project page.
![]()


Design Process
Through this project, I designed models, manufactured parts, built and tested physical robots, and revised accordingly.
2D & 3D Modeling
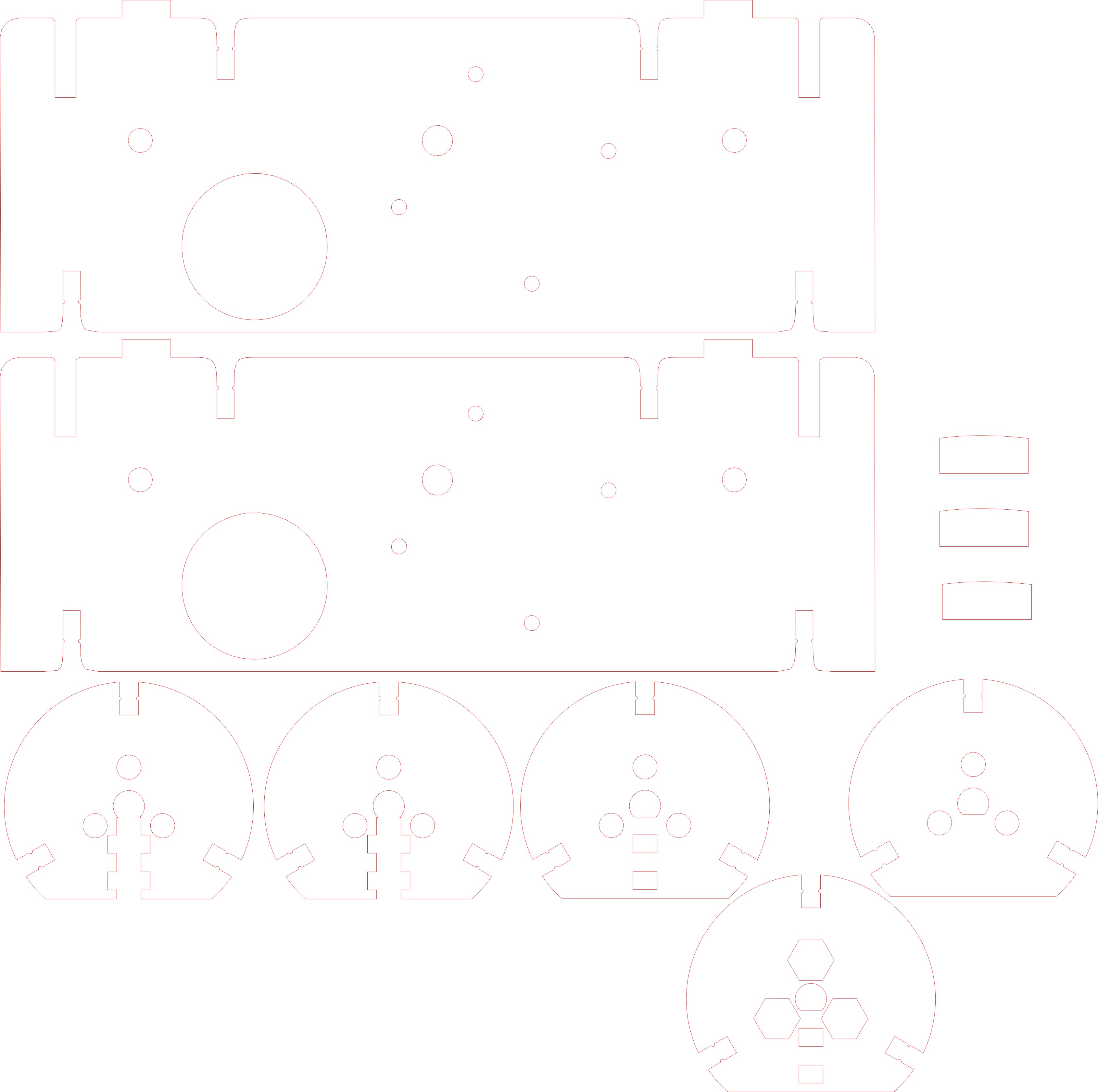
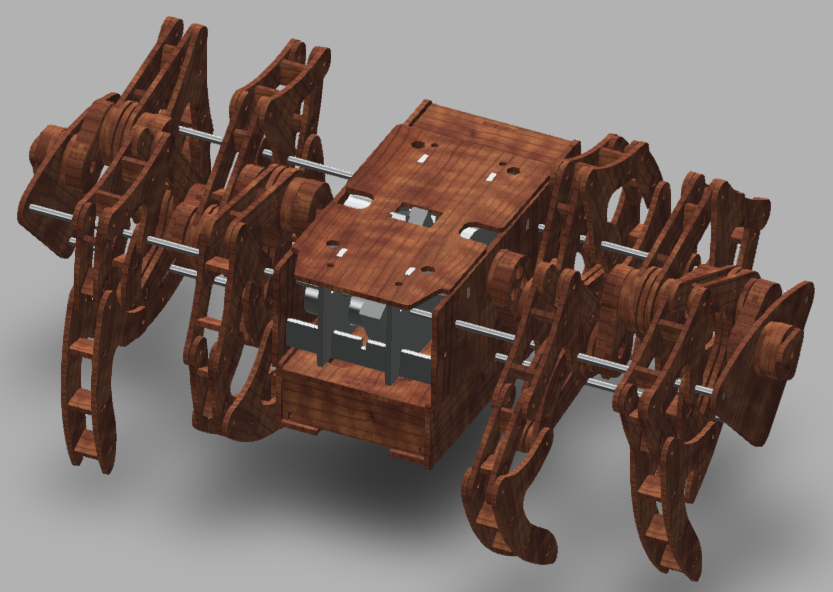
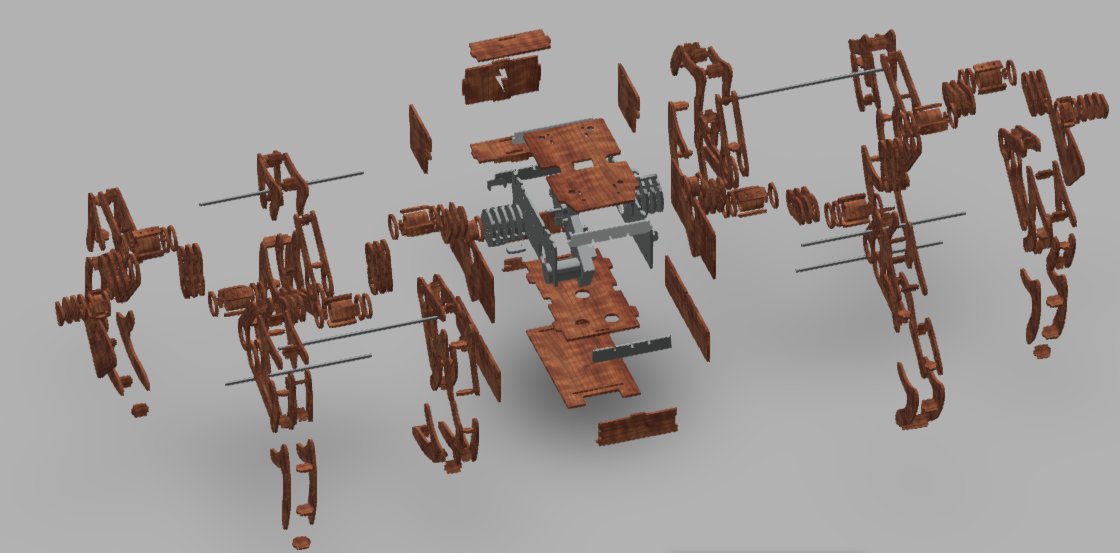
This robot is wooden and made up of lasercut pieces of plywood. These pieces were modeled in CorelDRAW in 2D, and transferred into Autodesk Fusion 360 3D modeling software. Here, pieces could be expanded to the width of the plywood according to real world specifications, and pieced together to form the entire model. As you can see in the exploded model, there were a lot of pieces developed!
Physical Building & Revisions


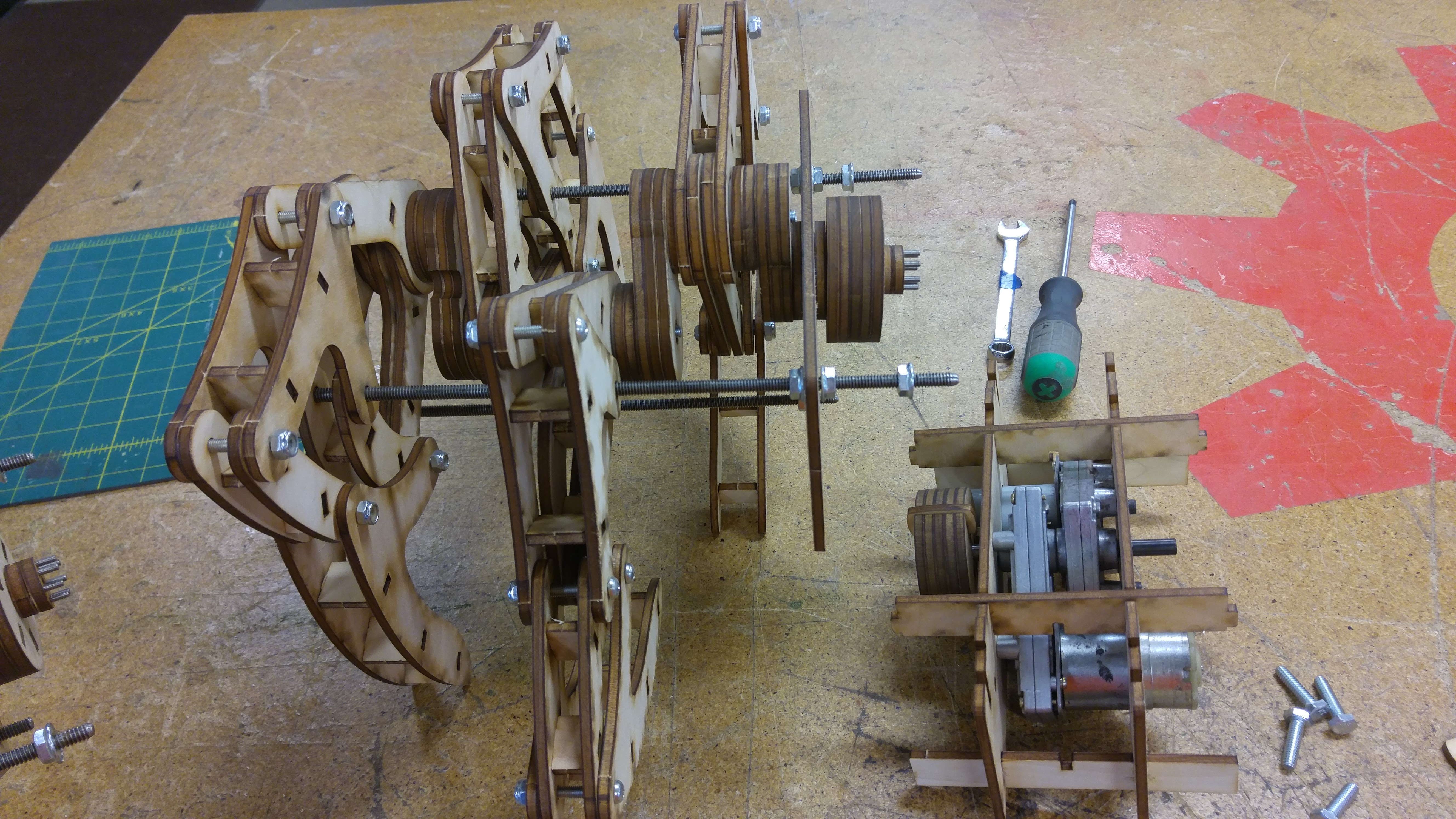
After modeling the pieces, I lasercut them out from plywood. Each of these pieces were then put together to form the base frame of the robot. The next step was to incorporate DC motors which would turn the crankshaft to make the creature walk. I had to design an adapter made up of layers of wooden pieces strong enough to handle the torque from the motor on the legs. This specifically took multiple revisions as early attempts broke easily under the stress of the legs.
Electronics

Relays were wired in a circuit connecting controller buttons to motors to propel legs forward or backward in a tank configuration.
Maker Faire 2016

I had the pleasure of attending the 2016 New York Maker Faire with Dan & Alex, showcasing our work and my time building the ZeGoBeast. What an incredible experience!